Author: Prof. Katsouleas Shapes a Generation of Difference Makers, Receives Prestigious NAE Award

|
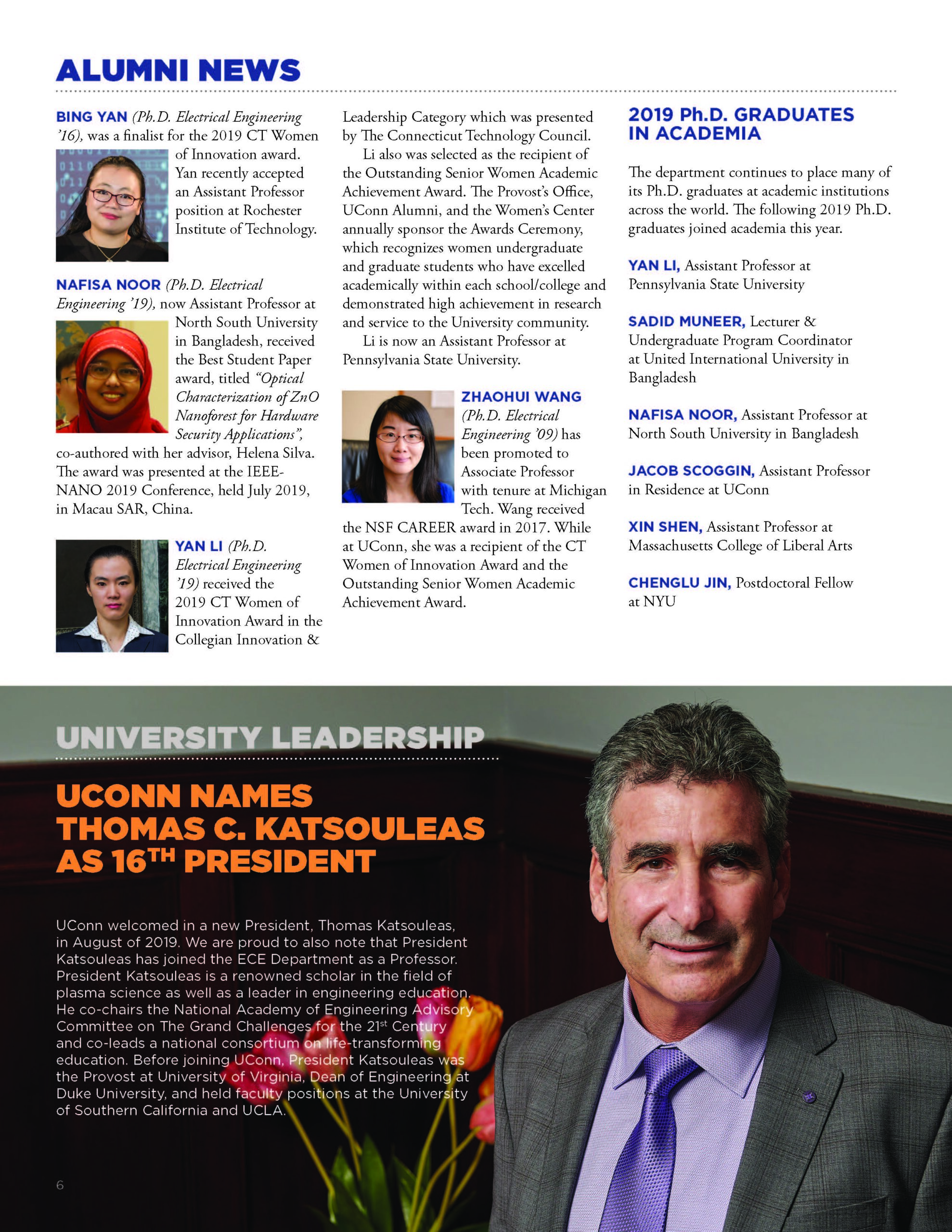
When Tom Katsouleas joined Duke University as dean of the Pratt School of Engineering in 2008, he saw an opportunity to not only change the world of engineering and its direction but put it into the hands of the next generation.
Katsouleas, currently a University of Connecticut faculty member in Electrical and Computer Engineering and Physics, picked up the phone during his first week as dean in 2008 and brought together engineering deans Yannis Yortsos at University of Southern California and Richard Miller at Olin College, and asked them a simple question: “Is our older educational pedagogy preparing our students to tackle the grand challenges of this next century?”
The grand challenges that Katsouleas was referring to were the list of “Grand Challenges” from the National Academy of Engineering in 2008 that outlined 14 areas of focus that engineers needed to tackle and advance. Some of the challenges included making solar energy economical, enhancing virtual reality, restoring and improving urban infrastructure, and to secure cyberspace.
“From that conversation, we conceptualized the first Grand Challenges Summit and the Grand Challenges Scholars Program, which was endorsed by the president of the NAE at the time,” Katsouleas said.
The Grand Challenges Summit, which has been organized regionally, nationally, and globally, has significantly shifted the conversation on how to tackle the Grand Challenges. At the first summit, Katsouleas said people were very excited about the Grand Challenges Scholars Program.
“We announced the program at that first summit, and immediately we had 12 schools interested off the bat,” Katsouleas said. “Over time, more and more people started showing interest, including the White House.”
In that call from the White House, they challenged Katsouleas and his collaborators to put together 50 interested schools, which they ultimately did and more, presenting on it to the Obama Administration—putting a major spotlight on the program. In March 2015, President Obama was sent a letter of commitment signed by 122 member schools pledging to educate and enroll 20,000 students in the program by 2025.
The Grand Challenges Scholars Program, well on its way towards that goal, is a curricular and extra-curricular program designed to immerse the student scholars in five core competencies: research/creative project experience, multidisciplinary solutions to the Grand Challenges, knowledge of business/entrepreneurship models that will help advance the Grand Challenges, multicultural issues and how they relate to the Grand Challenges, and social consciousness through service-learning experiences.
When Katsouleas became president at UConn in 2019, he shaped some of his vision for the future of the University from many of those core competencies.
“I saw the effect those competencies had when we applied them to the learning experience of the engineering students at Duke. Multiple studies have been done that show that life transformative experiences, service learning, and an entrepreneurial vision lead to successful students. When I came to UConn, I took a lot of those experiences and learnings with me and applied it more broadly to the entire campus,” Katsouleas said.
In January of this year, the NAE recognized Katsouleas and his collaborators for the impact that the Grand Challenge Scholars Program has made on society through the Bernard M. Gordon Prize, which recognizes trailblazers in engineering education.
When reflecting on the past decade of growth, Katsouleas can’t help but glow thinking about all the students that have benefited.
“When I was an undergraduate, I was interested in physics, but the courses didn’t satisfy me when it came to my desire to make a difference in the world. At the time I didn’t know I was missing something,” Katsouleas said. “So many of the students that have gone through this program got to have that experience and are making a sizable difference in this world.”
For more information on the NAE Grand Challenges Scholars Program, please click here.
Author: Prof. Junbo Zhao receives awards from the IEEE Power and Energy Society
Prof. Junbo Zhao recently joined the University of Connecticut’s ECE Department as an assistant professor and is serving as the grid modernization team lead at the Eversource Energy Center.
 Zhao, serving as chair of the IEEE Task Force on Power System Dynamic State and Parameter Estimation, was recognized as part of the IEEE group that earned the IEEE Power and Energy Society’s Technical Committee Working Group Recognition Award for Outstanding Technical Report. The award is in recognition of outstanding performance in the development of a report that impacts the power and energy community. The committee’s report is titled “Power System Dynamic State and Parameter Estimation-Transition to Power Electronics-Dominated Clean Energy Systems.” This report aims to 1) clearly review its motivations and definitions, demonstrate its values for enhanced power system modeling, monitoring, operation, control, and protection as well as power engineering education; 2) provide recommendations to vendors, national labs, utilities, and ISOs on the use of dynamic state estimator for enhancement of the reliability, security, and resiliency of electric power systems. More information on the report and authors can be found here.
Zhao, serving as chair of the IEEE Task Force on Power System Dynamic State and Parameter Estimation, was recognized as part of the IEEE group that earned the IEEE Power and Energy Society’s Technical Committee Working Group Recognition Award for Outstanding Technical Report. The award is in recognition of outstanding performance in the development of a report that impacts the power and energy community. The committee’s report is titled “Power System Dynamic State and Parameter Estimation-Transition to Power Electronics-Dominated Clean Energy Systems.” This report aims to 1) clearly review its motivations and definitions, demonstrate its values for enhanced power system modeling, monitoring, operation, control, and protection as well as power engineering education; 2) provide recommendations to vendors, national labs, utilities, and ISOs on the use of dynamic state estimator for enhancement of the reliability, security, and resiliency of electric power systems. More information on the report and authors can be found here.
Prof. Zhao was also recently appointed as the Technical Committee Program Chair of the IEEE PES Renewable Systems Integration Coordinating Committee and has been nominated to serve as the next chair of the IEEE PES Connecticut Chapter.
Author: Digital Control of a Robotic Arm
Digital Control of a Robotic Arm
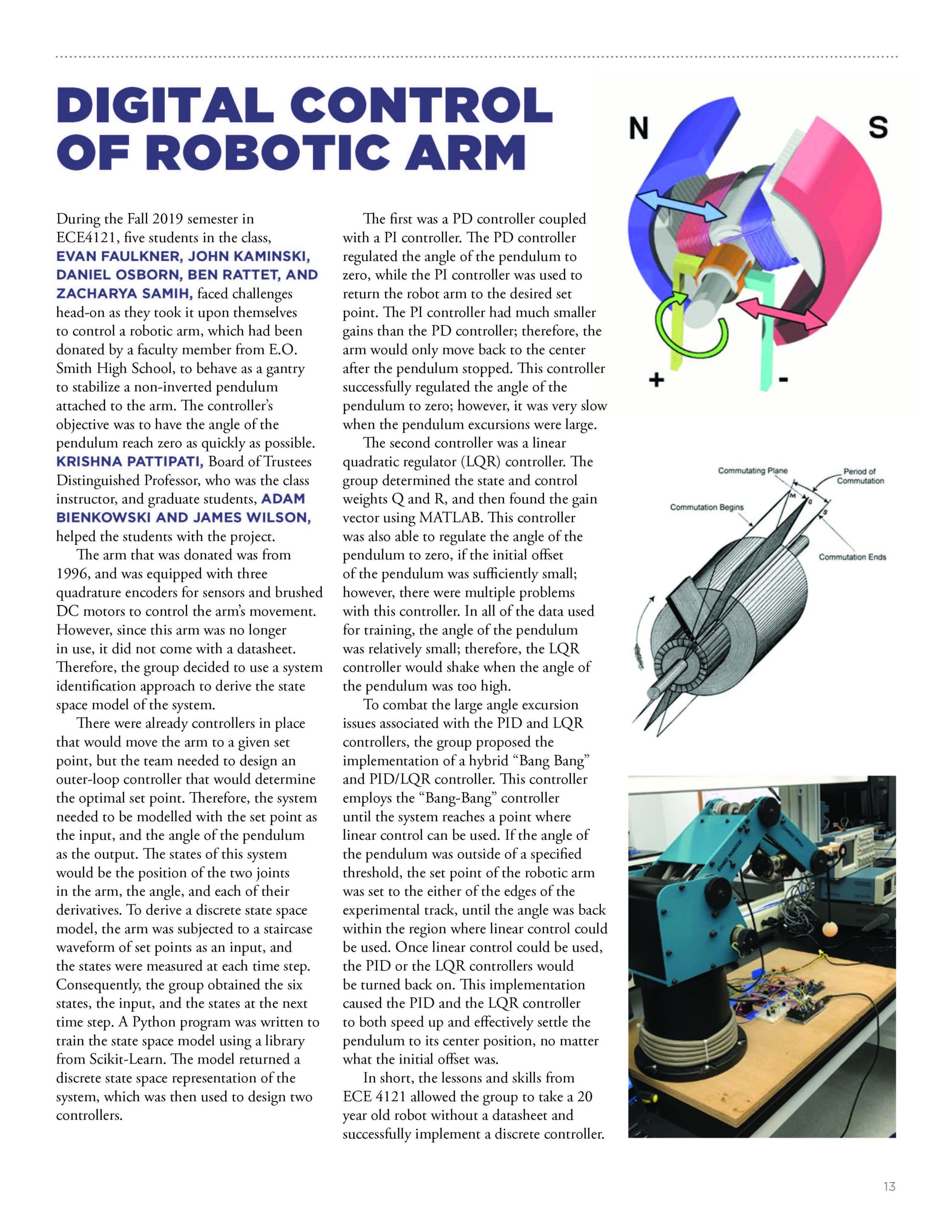
It is in ECE3111 (Systems Analysis) and ECE4121 (Digital Control Systems) that Electrical Engineering students first become exposed to the challenges of creating a stable control system. During the Fall 2019 semester in ECE4121, the five students in the class, Evan Faulkner, John Kaminski, Daniel Osborn, Ben Rattet, and Zacharya Samih, faced those challenges head on as they took it upon themselves to control a robotic arm to behave as a gantry to stabilize a non-inverted pendulum attached to the arm. The controller’s objective was to have the angle of the pendulum reach zero as quickly as possible. Prof. Krishna Pattipati, who was the class instructor, and graduate students, Adam Bienkowski and James Wilson, helped the students with the project.
The robotic arm used for this project was given to one of the group members by a faculty member at E. O. Smith High School. 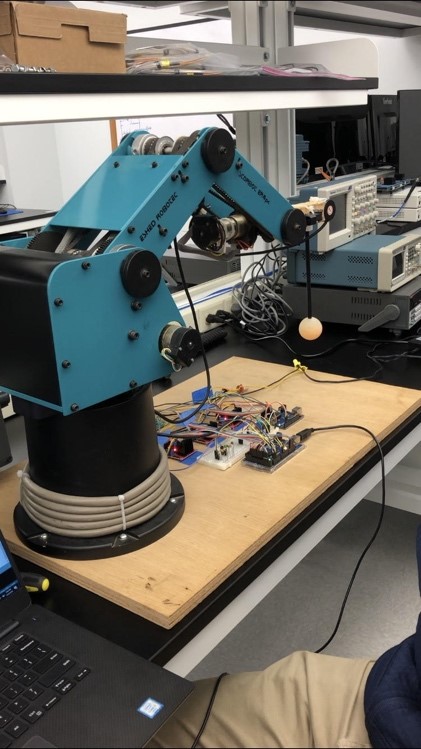 It was first purchased in 1996 and was no longer being used by the school. It was equipped with three quadrature encoders for sensors and brushed DC motors to control the arm’s movement. However, since this arm was no longer in use, it did not come with a datasheet. As a result, the group was unable to model the system using physics-based models, since the parameters of the arm were unknown. Therefore, the group decided to use a system identification approach to derive the state space model of the system.
It was first purchased in 1996 and was no longer being used by the school. It was equipped with three quadrature encoders for sensors and brushed DC motors to control the arm’s movement. However, since this arm was no longer in use, it did not come with a datasheet. As a result, the group was unable to model the system using physics-based models, since the parameters of the arm were unknown. Therefore, the group decided to use a system identification approach to derive the state space model of the system.
There were already controllers in place that would move the arm to a given set point, but the team needed to design an outer-loop controller that would determine the optimal set point. Therefore, the system needed to be modelled with the set point as the input, and the angle of the pendulum as the output. The states of this system would be the position of the two joints in the arm, the angle, and each of their derivatives. To derive a discrete state space model, the arm was subjected to a staircase waveform of set points as an input, and the states were measured at each time step. Consequently, the group obtained the six states, the input, and the states at the next time step. 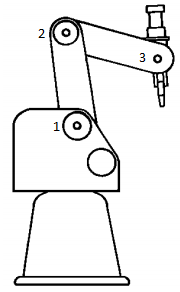 A Python program was written to train the state space model using a library from Scikit-Learn. The model returned a discrete state space representation of the system, which was then used to design two controllers.
A Python program was written to train the state space model using a library from Scikit-Learn. The model returned a discrete state space representation of the system, which was then used to design two controllers.
The first was a PD controller coupled with a PI controller. The PD controller regulated the angle of the pendulum to zero, while the PI controller was used to return the robot arm to the desired set point. The PI controller had much smaller gains than the PD controller; therefore, the arm would only move back to the center after the pendulum stopped. This controller successfully regulated the angle of the pendulum to zero; however, it was very slow when the pendulum excursions were large.
The second controller was a linear quadratic regulator (LQR) controller. The group determined the state and control weights Q and R, and then found the gain vector using MATLAB. This controller was also able to regulate the angle of the pendulum to zero, if the initial offset of the pendulum was sufficiently small; however, there were multiple problems with this controller. In all of the data used for training, the angle of the pendulum was relatively small; therefore, the LQR controller would shake when the angle of the pendulum was too high.
To combat the large angle excursion issues associated with the PID and LQR controllers, the group proposed the implementation of a hybrid “Bang Bang” and PID/LQR controller. This controller employs the “Bang-Bang” controller until the system reaches a point where linear control can be used. If the angle of the pendulum was outside of a specified threshold, the set point of the robotic arm was set to the either of the edges of the experimental track, until the angle was back within the region where linear control could be used. Once linear control could be used, the PID or the LQR controllers would be turned back on. This implementation caused the PID and the LQR controller to both speed up and effectively settle the pendulum to its center position, no matter what the initial offset was.
Author: Prof. Yang Cao inducted into CASE
Professor Yang Cao was elected as a new member of the Connecticut Academy of Sciences and Engineering (CASE) for 2020. Dr. Cao was recognized for his expertise in high voltage engineering and energy materials for power and medical devices. He received his Ph.D. from UConn in 2002, joined GE Research in Schenectady, NY, and then returned to UConn in 2013 joining the Electrical Engineering Department faculty. Dr. Cao also holds an appointment in the Institute of Materials Science and serves as Director of the Electrical Insulation Resource Center. His research is supported by funding from NSF, ONR, DOE, NASA, DOD, ARL, GE, and others. Dr. Cao and eight other UConn faculty will be formally inducted at the Academy’s 45th Annual Meeting and Dinner on May 26.
Author: Winter 2020 Newsletter












Author: Peter Luh and Shengli Zhou inducted into UConn NAI Chapter

Left to right: Dr. Cato Laurencin (President of UConn chapter of NAI), Prof. Shengli Zhou, and Dr. Radenka Maric (VP for Research, Innovation, and Entrepreneurship)
Profs. Peter Luh and Shengli Zhou were inducted as members of the UConn Chapter of the National Academy of Inventors (NAI) in a ceremony at the Mark Twain House in Hartford on Dec. 18 2019. Prof. Luh was recognized for his record of accomplishments in the field of optimization. Most recently,Prof. Luh received a patent along with Prof. Peng Zhang, colleagues, and students titled “Enabling Resilient Microgrid through Ultra-Fast Programmable Network”. The invention describes systems and methods for integrating ultra-fast programmable networks in microgrid are disclosed to provide flexible and easy-to-manage communication solutions, thus enabling resilient microgrid operations in the face of various cyber and physical disturbances. Prof. Zhou was inducted in recognition of his leadership in underwater acoustic communications.He co-invented the patent “Apparatus, which addresses the problems with systems and methods for enhanced multi-carrier based underwater acoustic communications” addresses the problems with Doppler effects induced by platform motions when communicating with high data rate multi-carrier based acoustic transmissions. The invention uses a two-step approach to mitigate frequency-dependent Doppler drifts and are advantageously applicable for fast-varying underwater acoustic channels.
Author: Joseph DiBenedetto receives PES Scholarship
Joseph DiBenedetto, a sophomore in Electrical Engineering, was selected to receive a scholarship as part of the IEEE Power and Energy Society Scholarship Plus Initiative. He will receive $2,000 for being named a PES scholar. Joseph was one among only 135 students selected from 78 U.S. and Canadian universities for the 2019-20 academic year. The initiative recognizes undergraduate students who have declared a major in electrical and computer engineering, are high achievers with strong GPAs with distinctive extracurricular commitments and are committed to exploring the power and energy field.
Author: Emerging Technologies in a Societal Context

Over the years, Prof. Rajeev Bansal has been writing columns for two of the IEEE professional magazines (Antennas and Propagation Magazine and Microwave Magazine), where he looks at emerging technologies in a broad societal context. A selection of columns was published by Wiley/IEEE Press (2017) as “From ER to E.T.: How Electromagnetic Technologies Are Changing Our Lives.” Working with his ECE colleagues Profs. Ayers and Silva, he also developed and taught a course (ECE 4099W) for electrical/computer engineering students, where they learn to discuss the larger context of engineering solutions. Recently, Prof. Bansal has become affiliated as a policy research scholar with the Consortium for Science, Policy, and Outcomes (CSPO), a leading Washington DC think tank on technology and policy issues (http://cspo.org/). In a new post for CSPO’s #AsWeNowThink blog, he takes a look at how the federal push for rapid 5G deployment may be sidelining local authorities: http://bit.ly/2M4QRH6.
Author: UConn Engineering Students Create Firefighting Drone
Please click this link if auto-redirection not applied.
Author: ECE Seminar Series: Crystalline Oxides for Emerging Microelectronic Devices

ECE Seminar Spring 2019
April 16, 2pm-3pm, ITE 401
Crystalline Oxides for Emerging Microelectronic Devices
Maruf Amin Bhuiyan
Yale University
Abstract:
Crystalline oxides are traditionally used for niche applications like thin film transistors, and also for basic scientific studies because of the rich physics they invoke. Recently, the availability of native bulk substrate of a semiconducting crystalline oxide, and the successful synthesis of crystalline-oxide insulators by the atomic layer deposition (ALD) process have opened horizons for these pristine materials to be used in various frontiers of microelectronic technologies, ranging from power electronics to memory applications.
Of the crystalline oxides studied, β-gallium oxide (β-Ga2O3) is a promising semiconducting crystalline oxide for future generations of power electronic devices; ALD grown crystalline magnesium-calcium-oxide (Mg0.25Ca0.75O) and lanthanum oxide (La2O3) have found their applications as high-quality gate dielectrics for gallium-nitride-based (GaN) and gallium-arsenide-based (GaAs) transistors, respectively; on the other hand, polycrystalline hafnium oxides have created a revolution in the field of ferroelectric memory.
This work focusses on electrical characterization of capacitors and transistors based on the aforementioned four types of crystalline oxides. Charge trapping during device operation is one major reliability concern. Significant efforts have been made to understand the charge trapping characteristics of crystalline-oxide-based devices. To reveal the trap characteristics, measurement techniques like constant-voltage stress, constant-current stress, and AC transconductance dispersion methods have been employed.
The potential of using crystalline-oxide-based devices in radiation rich environments, like outer space and high energy particle accelerators, have also been investigated. Radiation-induced damage can also be induced by CMOS chip processing, particularly in advanced technology nodes where extreme UV lithography is employed for patterning. Current-voltage, capacitance-voltage, and gate leakage measurements have been carried out to investigate the impact of total ionizing dose of X-ray radiation on the crystalline-oxide-based device performance. Process improvements and device architecture modifications have been made to improve the radiation hardness of these devices.
Short bio: Maruf is currently working under Professor T. P. Ma in the Electrical Engineering Department at Yale University. He obtained his B. Eng. from National University of Singapore (NUS) and M.S. & M. Phil. from Yale University. He is en-route to Ph.D. degree for May 2019, after which he will join IBM Research. His research works primarily involve fabrication and characterization of MOS devices tailored for high power and radiation harsh environment. He has several peer reviewed publications in journals like IEEE transactions, IEEE Electron Device Letters, Applied Physics Letters and presented in international conferences like IEEE Nuclear and Space Radiation Effects (NSREC) and IEEE Semiconductor Interface Specialist Conference (SISC). He has won awards including IBM PhD Fellowship and Yale Graduate Fellowship.
